
Ampliamo l'ampia gamma di prodotti Infranor per l'automazione con i nostri nuovi robot industriali e cobot, in grado di svolgere compiti variegati in numerose applicazioni. Lavorare insieme agli operatori delle macchine per aumentare l'efficienza in modo economico, sicuro e flessibile anche nelle piccole officine.
> Aumento della produttività e ottimizzazione dei processi
> Prestazioni costanti e accurate e flessibilità
> Facile da usare, si installa rapidamente
> Programmazione ottimizzata; il robot viene programmato automaticamente attraverso il CNC.
> Sicuro e affidabile
> Diminuzione dei tempi di produzione
> Rapido ritorno dell'investimento
| DCR-700-3-6 | DCR-1000-5-6 | DCR-1100-8-6 | DCR-1300-10-6 | DCR-1000-15-6 | DCR-1700-20-6 | Scaricare PDF | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Peso (Kg) | 16 | 24 | 30 | 38 | 32 | 65 | |||||||
| Carico utile (Kg) | 3 | 5 | 8 | 10 | 15 | 20 | |||||||
| Raggiungere | 700 | 1000 | 1100 | 1300 | 1000 | 1700 | |||||||
| Gradi di libertà | 6 | ||||||||||||
| Precisione di posizionamento a ripetizione | ±0.02 | ±0.03 | ±0.03 | ±0.03 | ±0.03 | ±0.05 | |||||||
| Classe IP | 54 | ||||||||||||
| Sensori | Sensore di coppia a sei dimensioni | ||||||||||||
| I/O | 2 ingressi, 2 uscite | ||||||||||||
| Velocità dell'attuatore finale | <2m> | ||||||||||||
| Bus di campo | Ethercat | ||||||||||||
| Tensione | 48DC | ||||||||||||
| Installazione | A pavimento, invertito, a sbalzo | ||||||||||||
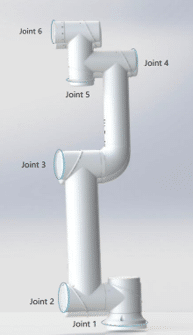
| Asse | Campo di lavoro | Velocità massima | Campo di lavoro | Velocità massima | Campo di lavoro | Velocità massima | Campo di lavoro | Velocità massima | Campo di lavoro | Velocità massima | Campo di lavoro | Velocità massima | |
| Giunto 1 | ±180° | ±180°/s | ±180° | ±125°/s | ±180° | ±125°/s | ±180° | ±125°/s | ±180° | ±125°/s | ±180° | ±125°/s | |
| Giunto 2 | ±180°/s | ±125°/s | ±125°/s | ±125°/s | ±125°/s | ±125°/s | |||||||
| Giunto 3 | ±180°/s | ±180°/s | ±125°/s | ±125°/s | ±125°/s | ±125°/s | |||||||
| Giunto 4 | ±200°/s | ±200°/s | ±180°/s | ±180°/s | ±200°/s | ±180°/s | |||||||
| Giunto 5 | ±200°/s | ±200°/s | ±180°/s | ±180°/s | ±200°/s | ±180°/s | |||||||
| Giunto 6 | ±200°/s | ±200°/s | ±180°/s | ±180°/s | ±200°/s | ±180°/s | |||||||