
Nous élargissons la large gamme de produits Infranor pour l'automatisation avec nos nouveaux robots industriels et cobots, capables de exécuter des tâches variées dans de nombreuses applications. La collaboration avec les opérateurs de machines permet d'accroître l'efficacité de manière rentable, sûre et flexible, même dans les petits ateliers.
> Augmentation de la productivité et optimisation des processus
> Performance et flexibilité constantes et précises
> Facile à utiliser, rapidement installé
> Programmation optimisée ; le robot est programmé automatiquement par la CNC
> Sûre et fiable
> Augmentation du temps de production
> Retour sur investissement rapide
| DCR-700-3-6 | DCR-1000-5-6 | DCR-1100-8-6 | DCR-1300-10-6 | DCR-1000-15-6 | DCR-1700-20-6 | Télécharger le PDF | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Poids (Kg) | 16 | 24 | 30 | 38 | 32 | 65 | PDF (EN ANGLAIS) | ||||||
| Charge utile (Kg) | 3 | 5 | 8 | 10 | 15 | 20 | |||||||
| Atteindre | 700 | 1000 | 1100 | 1300 | 1000 | 1700 | |||||||
| Degrés de liberté | 6 | ||||||||||||
| Précision du positionnement répété | ±0.02 | ±0.03 | ±0.03 | ±0.03 | ±0.03 | ±0.05 | |||||||
| Classe IP | 54 | ||||||||||||
| Capteurs | Capteur de couple à six dimensions | ||||||||||||
| E/S | 2 entrées, 2 sorties | ||||||||||||
| Vitesse de l'actionneur de fin de course | <2m> | ||||||||||||
| Bus de terrain | Ethercat | ||||||||||||
| Tension | 48DC | ||||||||||||
| Installation | Montage au sol, inversé, en porte-à-faux | ||||||||||||
| Axe | Plage de travail | Vitesse maximale | Plage de travail | Vitesse maximale | Plage de travail | Vitesse maximale | Plage de travail | Vitesse maximale | Plage de travail | Vitesse maximale | Plage de travail | Vitesse maximale | |
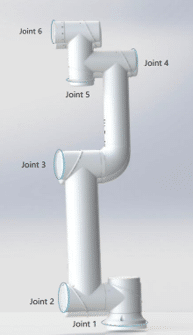
| Joint 1 | ±180° | ±180°/s | ±180° | ±125°/s | ±180° | ±125°/s | ±180° | ±125°/s | ±180° | ±125°/s | ±180° | ±125°/s | |
| Joint 2 | ±180°/s | ±125°/s | ±125°/s | ±125°/s | ±125°/s | ±125°/s | |||||||
| Joint 3 | ±180°/s | ±180°/s | ±125°/s | ±125°/s | ±125°/s | ±125°/s | |||||||
| Joint 4 | ±200°/s | ±200°/s | ±180°/s | ±180°/s | ±200°/s | ±180°/s | |||||||
| Joint 5 | ±200°/s | ±200°/s | ±180°/s | ±180°/s | ±200°/s | ±180°/s | |||||||
| Joint 6 | ±200°/s | ±200°/s | ±180°/s | ±180°/s | ±200°/s | ±180°/s | |||||||